Prashanth Ravichandar

Email
Curriculum Vitae
Google Scholar
LinkedIn
GitHub
Twitter
I am a PhD student at New York University (NYU) in the Electrical and Computer Engineering program. I am part of the Control/Robotics Research Lab advised by Prof. Farshad Khorrami. I hold an MS in Computer Science from the University of Southern California (USC). At USC, I worked at the Dynamic Robotics and Control Lab advised by Prof. Quan Nguyen. Before my time at USC, I worked as a Software Developer at Morgan Stanley. I graduated from the Indian Institute of Technology (IIT) Guwahati with a B.Tech in Engineering Physics and a minor in Computer Science and Engineering.
Publications
Preferenced Oracle Guided Multi-mode Policies for Dynamic Bipedal Loco-Manipulation
Prashanth Ravichandar*, Lokesh Krishna*, Nikhil Sobanbabu, Quan Nguyen
IROS 2025 | Website | arXiv | Paper | GitHub
Projects
Model-based Controller for Unitree A1 GitHub
Designed controllers in MATLAB Simscape for walking, turning, running, stair climbing and obstacle avoidance. Developed and implemented QP and MPC controllers, trotting gait sequence, a linear trajectory for walking, a cycloid trajectory for running and a 5th-order polynomial trajectory for stair climbing.
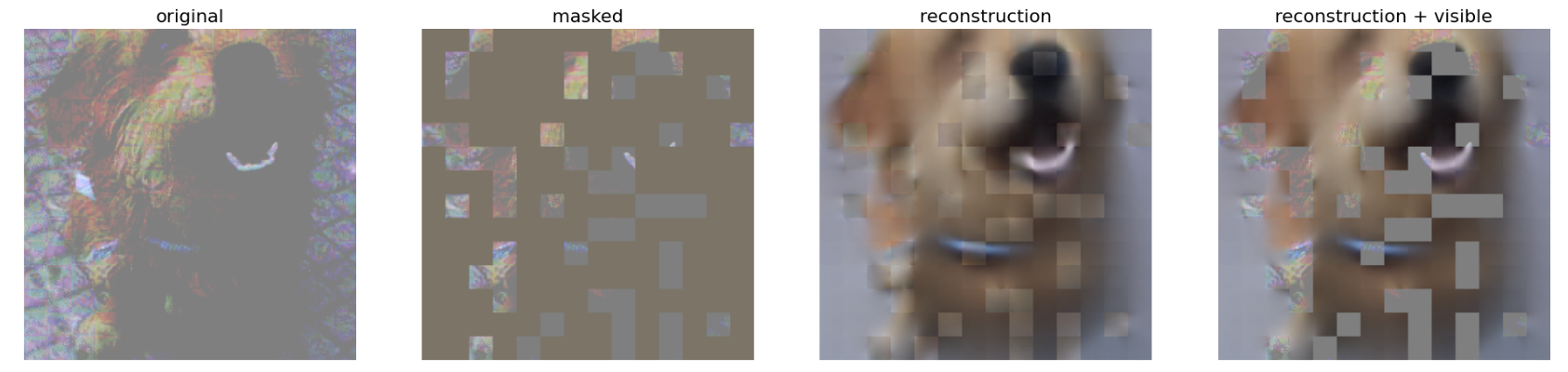
Masked Autoencoders for Adversarial Purification GitHub
Developed an adversarial image purification model by fine-tuning Masked Autoencoders (MAEs) to restore perturbed images to their original form, rendering adversarial attacks ineffective. Conducted experiments on the ImageNet dataset, successfully mitigating adversarial attacks generated by Gaussian noise and Fast Gradient Sign Method (FGSM).
Analysis of Surface Names for entities in Wikipedia GitHub
Analyzed the characteristics of incorrect links in Wikipedia articles and explored solutions to correct them. Created a novel dataset by parsing articles to extract contextual information of surface names and links.