
Projects
Controller for Unitree A1 Quadruped Robot GitHub
Designed controllers for Unitree A1 quadruped robot in MATLAB Simscape to perform walking, turning, running, stair climbing and obstacle avoidance. Developed and implemented QP and MPC controllers, trotting gait sequence, a linear trajectory for walking, a cycloid trajectory for running and a 5th-order polynomial trajectory for stair climbing.
 ”
”
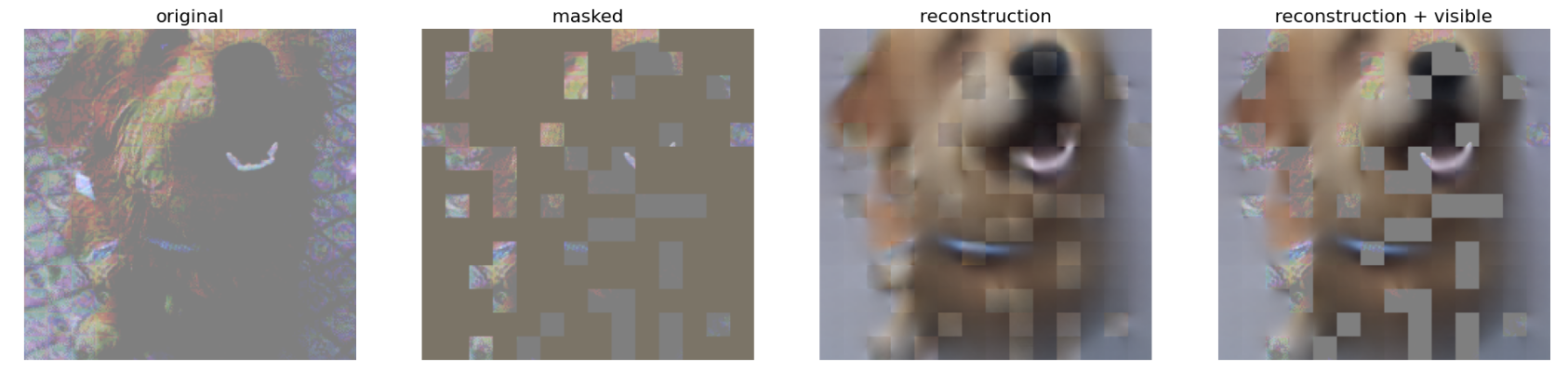
Masked Autoencoders for Adversarial Purification GitHub
Designed and implemented an adversarial image purification model using fine-tuned Masked Autoencoders (MAEs) to restore perturbed images to their original form, rendering adversarial attacks ineffective. Conducted experiments on the ImageNet dataset to mitigate adversarial attacks generated by Gaussian noise and the Fast Gradient Sign Method (FGSM).
Analysis of Surface Names for entities in Wikipedia GitHub
Analyzed the characteristics of incorrectly mapped links in Wikipedia pages and explored solutions to correct them. Created a novel dataset to aid in further research to provide contextual information of errors.